示例3:立方体
我们测试了一个示例,其能量函数如下所示: \begin{aligned} E(x)=\sum_{j=1}^{n}j(x_{j}^{2}-1)^{2}. \end{aligned}
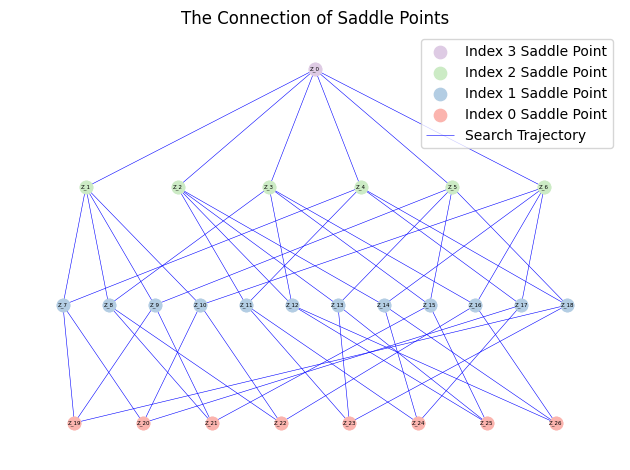
特别地,我们取 $n=3$.显然这个函数有27个鞍点 \((a,b,c),a,b,c \in \{-1,0,1\}\) ,它们恰好构成一个立方体的顶点、面心和体心。
首先,我们将 saddlescape-1.0 目录的路径添加到系统路径中:
import sys
import os
sys.path.append(os.path.abspath(os.path.join(os.getcwd(), '..', 'saddlescape-1.0')))
接着,我们导入主类:
from saddlescape import Landscape
import numpy as np
# import packages needed
定义3维情形的能量函数:
energyfunction=""
for i in range(3):
energyfunction+=str(i+1)+"*(x"+str(i+1)+"**2-1)**2+"
energyfunction=energyfunction[:-1]
初始化求解器并运行它:
# parameter initialization
x0 = np.array([0 for i in range(3)]) # initial point
dt = 1e-3 # time step
k = 3 # the maximum index of saddle point
acceme = 'nesterov'
neschoice = 2
nesres = 100
mom = 0.8
maxiter = 1000 # max iter
MyLandscape = Landscape(MaxIndex=k, AutoDiff=True, EnergyFunction=energyfunction, InitialPoint=x0,
TimeStep=dt, Acceleration=acceme, EigenCombination='all',
EigenMethod='euler', BBStep=False, NesterovChoice=neschoice, NesterovRestart=nesres,
Momentum=mom, MaxIter=maxiter, Verbose=True, ReportInterval=100,
EigenMaxIter=10, PerturbationRadius=1e-2)
# Instantiation
MyLandscape.Run()
# Calculate
HiSD Solver Configuration:
------------------------------
[HiSD] Current parameters (initialized):
[Config Sync] `Dim` parameter auto-adjusted to 3 based on `InitialPoint` dimensionality.
Parameter `NumericalGrad` not specified - using default value False.
Parameter `DimerLength` not specified - using default value 1e-05.
Parameter `Tolerance` not specified - using default value 1e-06.
Parameter `SearchArea` not specified - using default value 1000.0.
Parameter `HessianDimerLength` not specified - using default value 1e-05.
Parameter `EigenStepSize` not specified - using default value 1e-05.
Parameter `ExactHessian` not specified - using default value False.
Parameter `PrecisionTol` not specified - using default value 1e-05.
Parameter `EigvecUnified` not specified - using default value False.
Parameter 'GradientSystem' not provided. Enabling automatic symmetry detection.
Parameter 'SymmetryCheck' not provided. Defaulting to True with automatic detection if available.
Gradient system detected. Activating HiSD algorithm.
Landscape Configuration:
------------------------------
[Landscape] Current parameters (initialized):
Parameter `SameJudgementMethod` not specified - using default value <function LandscapeCheckParam.<locals>.<lambda> at 0x000002D073C50D30>.
Parameter `PerturbationMethod` not specified - using default value uniform.
Parameter `InitialEigenVectors` not specified - using default value None.
Parameter `PerturbationNumber` not specified - using default value 2.
Parameter `SaveTrajectory` not specified - using default value True.
Parameter `MaxIndexGap` not specified - using default value 1.
Start running:
------------------------------
From initial point search index-3:
------------------------------
Iteration: 100|| Norm of gradient: 0.000395
Iteration: 200|| Norm of gradient: 0.000011
Non-degenerate saddle point identified: Morse index =3 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 0.701095
Iteration: 200|| Norm of gradient: 0.120058
Iteration: 300|| Norm of gradient: 0.002034
Iteration: 400|| Norm of gradient: 0.000060
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 0.701121
Iteration: 200|| Norm of gradient: 0.120000
Iteration: 300|| Norm of gradient: 0.002032
Iteration: 400|| Norm of gradient: 0.000059
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 0.877872
Iteration: 200|| Norm of gradient: 0.157527
Iteration: 300|| Norm of gradient: 0.006545
Iteration: 400|| Norm of gradient: 0.000194
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 0.877896
Iteration: 200|| Norm of gradient: 0.157552
Iteration: 300|| Norm of gradient: 0.006546
Iteration: 400|| Norm of gradient: 0.000194
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 3.268317
Iteration: 200|| Norm of gradient: 0.001273
Iteration: 300|| Norm of gradient: 0.000014
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 3.268640
Iteration: 200|| Norm of gradient: 0.001272
Iteration: 300|| Norm of gradient: 0.000014
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 2.725669
Iteration: 200|| Norm of gradient: 0.289363
Iteration: 300|| Norm of gradient: 0.000828
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 2.725944
Iteration: 200|| Norm of gradient: 0.289275
Iteration: 300|| Norm of gradient: 0.000828
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 2.721569
Iteration: 200|| Norm of gradient: 0.019025
Iteration: 300|| Norm of gradient: 0.000049
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 2.721581
Iteration: 200|| Norm of gradient: 0.019025
Iteration: 300|| Norm of gradient: 0.000049
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 2.739767
Iteration: 200|| Norm of gradient: 0.018057
Iteration: 300|| Norm of gradient: 0.000046
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-3, ID-0) search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 2.739761
Iteration: 200|| Norm of gradient: 0.018057
Iteration: 300|| Norm of gradient: 0.000046
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-2, ID-1) search index-1:
------------------------------
Iteration: 100|| Norm of gradient: 4.902430
Iteration: 200|| Norm of gradient: 0.001221
Iteration: 300|| Norm of gradient: 0.000026
Non-degenerate saddle point identified: Morse index =1 (number of negative eigenvalues).
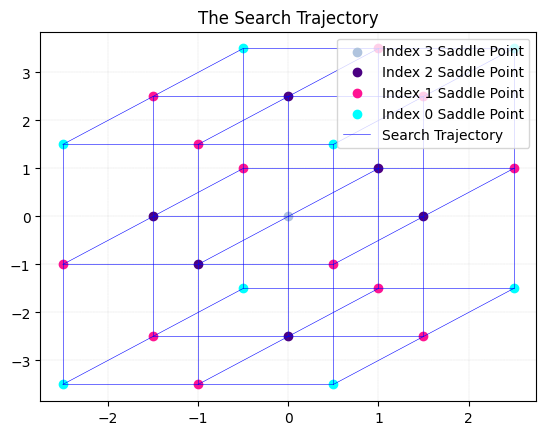
由于系统是三维的,我们定义了一个投影函数来绘制轨迹。
def proj_func(input):
output = np.hstack((1.0 * input[:, [0]]+ 1.5 * input[:, [1]], 1.0 * input[:, [0]]+ 2.5 * input[:, [2]]))
return output
MyLandscape.DrawTrajectory(ContourGridNum=100, ContourGridOut=25, Projection=proj_func)
# Draw the search path. But because of the large dimension, we cannot draw the picture.
[WARNING] Contour plot and heatmap cannot be generated after projection because the projection function may not be injective.
我们也可以绘制解景观并保存数据。
MyLandscape.DrawConnection()
MyLandscape.Save('output/Ex_PhaseField','mat')
# Save the data