Example 1 : Butterfly
We test the example whose heatmap resembles a butterfly shape and the energy function is shown by
\[\begin{aligned} E(x,y)=x^{4}-1.5x^{2}y^{2}+y^{4}-2y^{3}+y^{2}+x^{2}y-2x^{2}. \end{aligned}\]First, we add the path of the saddlescape-1.0 directory to the system path.
import sys
import os
sys.path.append(os.path.abspath(os.path.join(os.getcwd(), '..', 'saddlescape-1.0')))
Then, we import the main class.
from saddlescape import Landscape
import numpy as np
# import packages needed
We define the energy function.
energyfunction = 'x1**4 -1.5*x1**2*x2**2+ x2**4 - 2*x2**3 + x2**2 + x1**2*x2 - 2*x1**2'
# given energy function
# parameter initialization
x0 = np.array([0.1, 0.1]) # initial point
dt = 1e-2 # time step
k = 2 # the maximum index of saddle point
acceme = 'none'
maxiter = 10000 # max iter
We initialize the solver and run it.
MyLandscape = Landscape(MaxIndex=k, AutoDiff=True, EnergyFunction=energyfunction,
EigenMethod='euler', EigenMaxIter=1, InitialPoint=x0,
TimeStep=dt, Acceleration=acceme, MaxIter=maxiter,
EigenCombination='all', PerturbationNumber=1,
PerturbationRadius=1e-2, Verbose=True, ReportInterval=100)
# Instantiation
MyLandscape.Run()
HiSD Solver Configuration:
------------------------------
[HiSD] Current parameters (initialized):
[Config Sync] `Dim` parameter auto-adjusted to 2 based on `InitialPoint` dimensionality.
Parameter `NumericalGrad` not specified - using default value False.
Parameter `Momentum` not specified - using default value 0.0.
Parameter `BBStep` not specified - using default value False.
Parameter `DimerLength` not specified - using default value 1e-05.
Parameter `Tolerance` not specified - using default value 1e-06.
Parameter `NesterovChoice` not specified - using default value 1.
Parameter `SearchArea` not specified - using default value 1000.0.
Parameter `NesterovRestart` not specified - using default value None.
Parameter `HessianDimerLength` not specified - using default value 1e-05.
Parameter `EigenStepSize` not specified - using default value 1e-05.
Parameter `ExactHessian` not specified - using default value False.
Parameter `PrecisionTol` not specified - using default value 1e-05.
Parameter `EigvecUnified` not specified - using default value False.
Parameter 'GradientSystem' not provided. Enabling automatic symmetry detection.
Parameter 'SymmetryCheck' not provided. Defaulting to True with automatic detection if available.
Gradient system detected. Activating HiSD algorithm.
Landscape Configuration:
------------------------------
[Landscape] Current parameters (initialized):
Parameter `SameJudgementMethod` not specified - using default value <function LandscapeCheckParam.<locals>.<lambda> at 0x000002CD1746C670>.
Parameter `PerturbationMethod` not specified - using default value uniform.
Parameter `InitialEigenVectors` not specified - using default value None.
Parameter `SaveTrajectory` not specified - using default value True.
Parameter `MaxIndexGap` not specified - using default value 1.
Start running:
------------------------------
From initial point search index-2:
------------------------------
Iteration: 100|| Norm of gradient: 0.176823
Iteration: 200|| Norm of gradient: 0.084819
Iteration: 300|| Norm of gradient: 0.032330
Iteration: 400|| Norm of gradient: 0.011899
Iteration: 500|| Norm of gradient: 0.004359
Iteration: 600|| Norm of gradient: 0.001596
Iteration: 700|| Norm of gradient: 0.000584
Iteration: 800|| Norm of gradient: 0.000214
Iteration: 900|| Norm of gradient: 0.000078
Iteration: 1000|| Norm of gradient: 0.000029
Iteration: 1100|| Norm of gradient: 0.000010
Iteration: 1200|| Norm of gradient: 0.000004
Iteration: 1300|| Norm of gradient: 0.000001
Non-degenerate saddle point identified: Morse index =2 (number of negative eigenvalues).
From saddle point (index-2, ID-0) search index-1:
------------------------------
Iteration: 100|| Norm of gradient: 0.023111
Iteration: 200|| Norm of gradient: 0.061258
Iteration: 300|| Norm of gradient: 0.144118
Iteration: 400|| Norm of gradient: 0.183221
Iteration: 500|| Norm of gradient: 0.063280
Iteration: 600|| Norm of gradient: 0.010152
Iteration: 700|| Norm of gradient: 0.001384
Iteration: 800|| Norm of gradient: 0.000184
Iteration: 900|| Norm of gradient: 0.000024
Iteration: 1000|| Norm of gradient: 0.000003
Non-degenerate saddle point identified: Morse index =1 (number of negative eigenvalues).
From saddle point (index-2, ID-0) search index-1:
------------------------------
Iteration: 100|| Norm of gradient: 0.023108
Iteration: 200|| Norm of gradient: 0.061250
Iteration: 300|| Norm of gradient: 0.144105
Iteration: 400|| Norm of gradient: 0.183230
Iteration: 500|| Norm of gradient: 0.063294
Iteration: 600|| Norm of gradient: 0.010155
Iteration: 700|| Norm of gradient: 0.001384
Iteration: 800|| Norm of gradient: 0.000184
Iteration: 900|| Norm of gradient: 0.000024
Iteration: 1000|| Norm of gradient: 0.000003
Non-degenerate saddle point identified: Morse index =1 (number of negative eigenvalues).
From saddle point (index-2, ID-0) search index-1:
------------------------------
Iteration: 100|| Norm of gradient: 0.069550
Iteration: 200|| Norm of gradient: 1.384067
Iteration: 300|| Norm of gradient: 0.016423
Iteration: 400|| Norm of gradient: 0.000428
Iteration: 500|| Norm of gradient: 0.000011
Non-degenerate saddle point identified: Morse index =1 (number of negative eigenvalues).
From saddle point (index-2, ID-0) search index-1:
------------------------------
Iteration: 100|| Norm of gradient: 0.070554
Iteration: 200|| Norm of gradient: 1.382590
Iteration: 300|| Norm of gradient: 0.016414
Iteration: 400|| Norm of gradient: 0.000428
Iteration: 500|| Norm of gradient: 0.000011
Non-degenerate saddle point identified: Morse index =1 (number of negative eigenvalues).
From saddle point (index-1, ID-1) search index-0:
------------------------------
Iteration: 100|| Norm of gradient: 2.798815
Iteration: 200|| Norm of gradient: 0.084903
Iteration: 300|| Norm of gradient: 0.000135
Non-degenerate saddle point identified: Morse index =0 (number of negative eigenvalues).
From saddle point (index-1, ID-1) search index-0:
------------------------------
Iteration: 100|| Norm of gradient: 2.798815
Iteration: 200|| Norm of gradient: 0.084903
Iteration: 300|| Norm of gradient: 0.000135
Non-degenerate saddle point identified: Morse index =0 (number of negative eigenvalues).
From saddle point (index-1, ID-2) search index-0:
------------------------------
Iteration: 100|| Norm of gradient: 1.475986
Iteration: 200|| Norm of gradient: 0.295764
Iteration: 300|| Norm of gradient: 0.008081
Iteration: 400|| Norm of gradient: 0.000190
Iteration: 500|| Norm of gradient: 0.000004
Non-degenerate saddle point identified: Morse index =0 (number of negative eigenvalues).
From saddle point (index-1, ID-2) search index-0:
------------------------------
Iteration: 100|| Norm of gradient: 1.475986
Iteration: 200|| Norm of gradient: 0.295764
Iteration: 300|| Norm of gradient: 0.008081
Iteration: 400|| Norm of gradient: 0.000190
Iteration: 500|| Norm of gradient: 0.000004
Non-degenerate saddle point identified: Morse index =0 (number of negative eigenvalues).
From saddle point (index-1, ID-3) search index-0:
------------------------------
Iteration: 100|| Norm of gradient: 1.432133
Iteration: 200|| Norm of gradient: 0.273676
Iteration: 300|| Norm of gradient: 0.000454
Non-degenerate saddle point identified: Morse index =0 (number of negative eigenvalues).
From saddle point (index-1, ID-3) search index-0:
------------------------------
Iteration: 100|| Norm of gradient: 0.818020
Iteration: 200|| Norm of gradient: 0.214057
Iteration: 300|| Norm of gradient: 0.005585
Iteration: 400|| Norm of gradient: 0.000131
Iteration: 500|| Norm of gradient: 0.000003
Non-degenerate saddle point identified: Morse index =0 (number of negative eigenvalues).
From saddle point (index-1, ID-4) search index-0:
------------------------------
Iteration: 100|| Norm of gradient: 0.818020
Iteration: 200|| Norm of gradient: 0.214057
Iteration: 300|| Norm of gradient: 0.005585
Iteration: 400|| Norm of gradient: 0.000131
Iteration: 500|| Norm of gradient: 0.000003
Non-degenerate saddle point identified: Morse index =0 (number of negative eigenvalues).
From saddle point (index-1, ID-4) search index-0:
------------------------------
Iteration: 100|| Norm of gradient: 1.432133
Iteration: 200|| Norm of gradient: 0.273676
Iteration: 300|| Norm of gradient: 0.000454
Non-degenerate saddle point identified: Morse index =0 (number of negative eigenvalues).
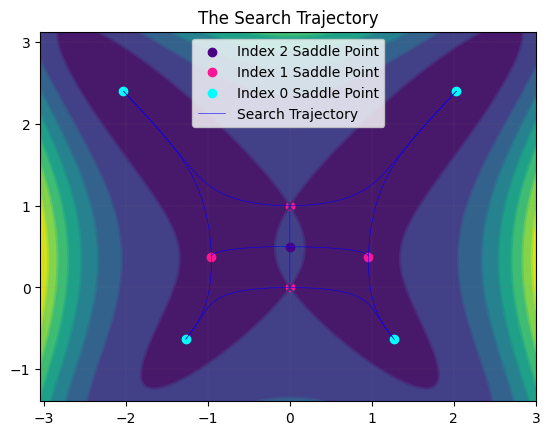
We draw the search trajectory.
We draw the search trajectory.
MyLandscape.DrawTrajectory(ContourGridNum=100, ContourGridOut=25, DetailedTraj=True)
# Draw the search path.
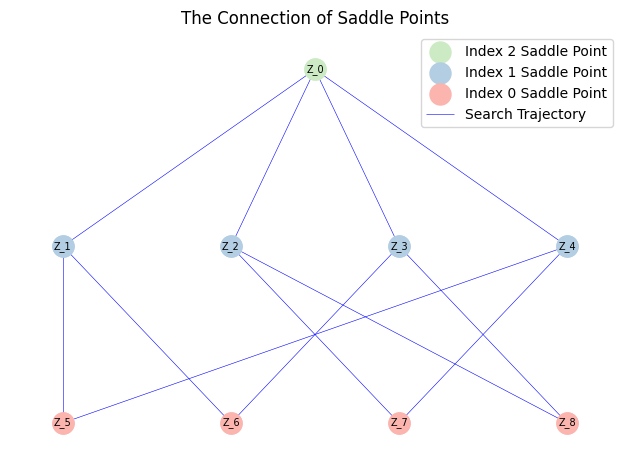
We can also draw the solution landscape and save the data.
MyLandscape.DrawConnection()
MyLandscape.Save('output/Ex_Butterfly')
# Save the data
Then, we save the search trajectory.
import json
detail = MyLandscape.DetailRecord
output = {
"Start ID": [row[1] for row in detail],
"End ID": [row[0] for row in detail],
"Path Positions": [row[2].tolist() for row in detail],
"Path Times": [row[3].tolist() for row in detail]
}
with open('output/Ex_ButterflyDetail.json', 'w') as f:
json.dump(output, f)
Moreover, we can do more post-processing using the output data. We will generate the motiion graph of search trajectory as an example.
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
from matplotlib.colors import Colormap
def animateSL(fig: plt.Figure,
ax: plt.Axes,
saddleinfo: dict,
trajinfo: dict,
ColorsMI: Colormap = plt.get_cmap("tab10"),
ColorTraj: list|str = "blue",
dt_per_frame: float = 0.2,
fps: int = None):
IDs: list[int] = saddleinfo["IDs"] # Tags of saddles
coords: list[np.ndarray] = saddleinfo["coords"] # Coordinates
MIs: list[int] = saddleinfo["MIs"] # Morse indices
parentIDs: list[list[int]] = saddleinfo["parentIDs"] # Parent saddles
trajectories: list[np.ndarray] = trajinfo["trajectories"] # Trajectories
times: list[np.ndarray] = trajinfo["times"] # times
startIDs: list[int] = trajinfo["startIDs"] # Starting saddle"s tag
endIDs: list[int] = trajinfo["endIDs"] # Ending saddle"s tag
N_traj = len(trajectories) # Number of trajectories
assert N_traj == len(times) == len(startIDs) == len(endIDs)
for i, traj, time in zip(range(N_traj), trajectories, times):
assert len(traj) == len(time), f"Different length of {i}-th trajectory and time"
trajectoriesFrom: list[list[int]] = [[] for _ in range(len(IDs))]
for i, startID in enumerate(startIDs):
if startID >= 0:
trajectoriesFrom[startID].append(i)
colorSaddle: list[tuple] = [ColorsMI(MI) for MI in MIs]
if isinstance(ColorTraj, str):
colorTraj: list[str] = [ColorTraj] * N_traj
ZORDER_TRAJ = 100000
ZORDER_SADDLE = 200000
ZORDER_TEXT = 300000
if fps is None:
fps = 1 / dt_per_frame
lentraj = [len(traj) for traj in trajectories]
saddleArtists = [ax.plot([], [], "o", color=colorSaddle[i], zorder=ZORDER_SADDLE)[0] for i in range(len(IDs))]
trajArtists = [ax.plot([], [], color=colorTraj[i], zorder=ZORDER_TRAJ)[0] for i in range(N_traj)]
startArtists = [ax.plot([], [], color=colorTraj[i], zorder=ZORDER_TRAJ, linestyle="--")[0] for i in range(N_traj)]
endArtists = [ax.plot([], [], color=colorTraj[i], zorder=ZORDER_TRAJ, linestyle="--")[0] for i in range(N_traj)]
_awakeMoment = np.ones(len(IDs)) * np.inf # Activation moment of each saddle
_pendingTraj = []
plotSaddle = lambda id: saddleArtists[id].set_data([coords[id][0]], [coords[id][1]])
startTraj = lambda i: startArtists[i].set_data([coords[startIDs[i]][0], trajectories[i][0, 0]],
[coords[startIDs[i]][1], trajectories[i][0, 1]])
endTraj = lambda i: endArtists[i].set_data([trajectories[i][-1, 0], coords[endIDs[i]][0]],
[trajectories[i][-1, 1], coords[endIDs[i]][1]])
def init_frame():
nonlocal _awakeMoment, _pendingTraj
for id, parentID in enumerate(parentIDs):
if -1 in parentID:
plotSaddle(id)
_awakeMoment[id] = 0.0
for i in trajectoriesFrom[id]:
startTraj(i)
_pendingTraj.append(i)
return saddleArtists + trajArtists + startArtists + endArtists
def frame_generator():
nonlocal _awakeMoment, _pendingTraj
pointer = np.zeros(N_traj, dtype=int)
_pendingSaddle = []
_pendingTraj_temp = []
current_time = 0.0
while _pendingTraj:
current_time += dt_per_frame
while _pendingTraj or _pendingSaddle:
if _pendingTraj:
i = _pendingTraj.pop(0)
startID = startIDs[i]
while pointer[i] < lentraj[i] and times[i][pointer[i]] + _awakeMoment[startID] <= current_time:
pointer[i] += 1
trajArtists[i].set_data(trajectories[i][:pointer[i], 0], trajectories[i][:pointer[i], 1])
if pointer[i] == lentraj[i]:
endTraj(i)
endID = endIDs[i]
if not endID in _pendingSaddle:
_pendingSaddle.append(endID)
if _awakeMoment[endID] > times[i][-1] + _awakeMoment[startID]:
_awakeMoment[endID] = times[i][-1] + _awakeMoment[startID]
_pendingSaddle.sort(key=lambda id: _awakeMoment[id])
else:
_pendingTraj_temp.append(i)
else:
id = _pendingSaddle.pop(0)
plotSaddle(id)
_pendingTraj += trajectoriesFrom[id]
yield saddleArtists + trajArtists + startArtists + endArtists
_pendingTraj = _pendingTraj_temp.copy()
_pendingTraj_temp.clear()
return FuncAnimation(fig,
lambda frame: frame,
frame_generator,
init_frame,
blit=True,
interval=dt_per_frame * 1000,
cache_frame_data=False)
import json
dpi: float = 100
xlim = [-3, 3]
ylim = [-2, 3]
fig, ax = plt.subplots(dpi=dpi)
ax.set_xlim(xlim)
ax.set_ylim(ylim)
ax.set_aspect("equal")
x, y = np.meshgrid(np.linspace(xlim[0], xlim[1], 100), np.linspace(ylim[0], ylim[1], 100))
z = x**4 - 1.5*x**2*y**2 + y**4 - 2*y**3 + y**2 + x**2*y - 2*x**2 # SPECIFIC
contourf_args: dict = {"levels": 20}
if "levels" in contourf_args and contourf_args["levels"] >= 0:
ax.contourf(x, y, z, **contourf_args)
with open("output/Ex_Butterfly.json", "r") as f:
saddle_data = json.load(f) # Load the data
saddleinfo = {"IDs": saddle_data["SaddleID"],
"coords": np.array(saddle_data["Position"])[:, :, 0],
"MIs": saddle_data["MorseIndex"],
"parentIDs": saddle_data["FatherSet"]}
with open("output/Ex_ButterflyDetail.json", "r") as f:
traj_data = json.load(f) # Load the data
trajinfo = {"trajectories": [np.array(traj) for traj in traj_data["Path Positions"]],
"times": [time for time in traj_data["Path Times"]],
"startIDs": traj_data["Start ID"],
"endIDs": traj_data["End ID"]}
ani = animateSL(fig, ax, saddleinfo, trajinfo, dt_per_frame=0.02)
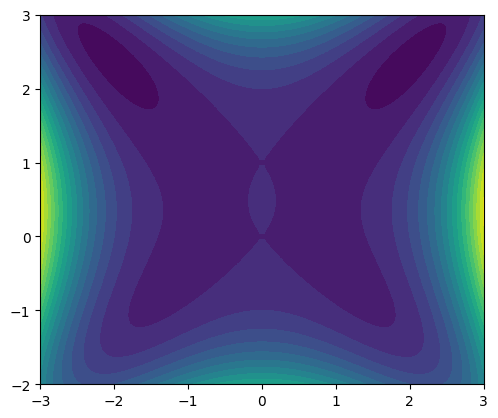
We can export the animation to different file types.
ani.save("output/Ex_Butterfly.mp4", writer="ffmpeg") # Must install ffmpeg
The generated animated image is displayed as follows: